光学ガラス表面検査ロボット/Robin
![]()
![]()
| ガラス表面の欠点検出とトレーへの割り振りを行うロボットです。 |
| 特徴 |
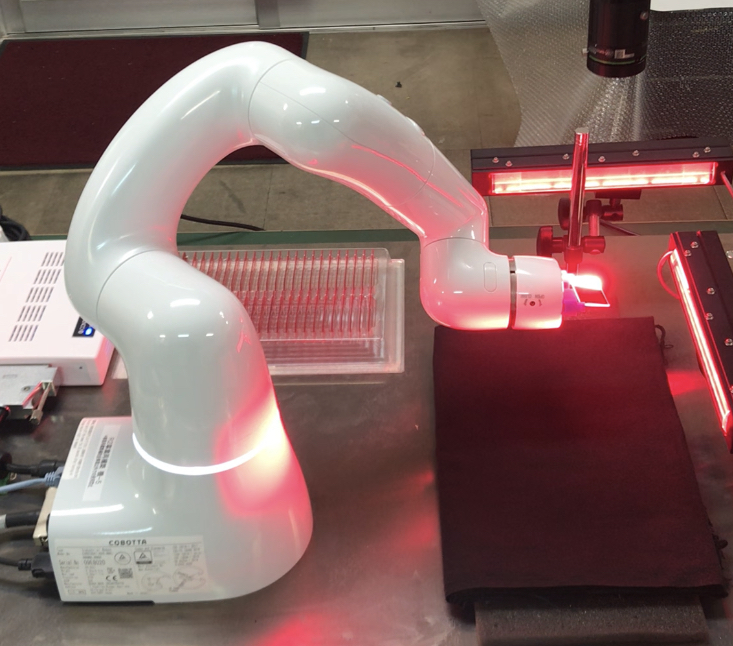
| 透明ワークや鏡面反射ワーク表面の検査に当社のローアングル照明LA-0の原理を応用。 |
| ロボットがワークを把持して照明光の照射角度を変える動作を行います。 |
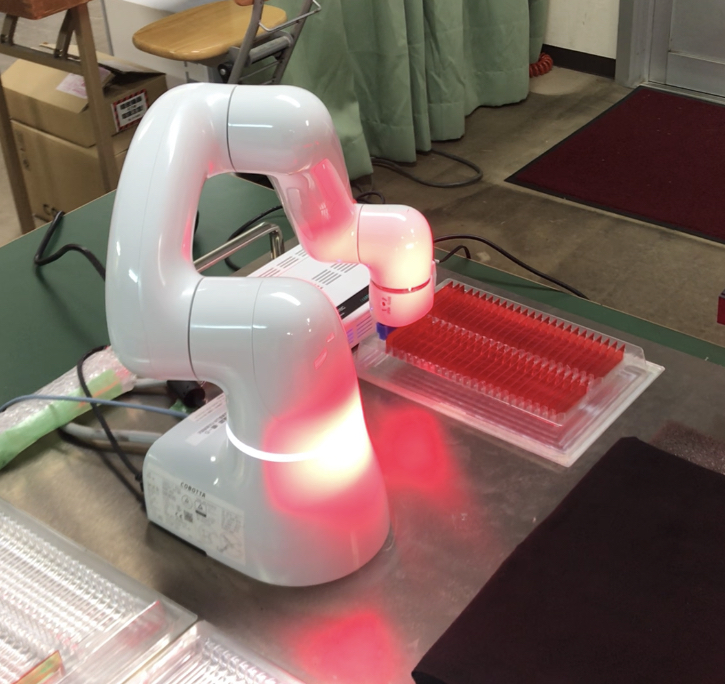
| 検査前トレーからワークを取り出して欠点検査の後、良品トレーと不良品トレーにロボットが振り分けます。 |
| 普段の目視検査の環境をそのまま維持したまま導入できるロボットです。 |
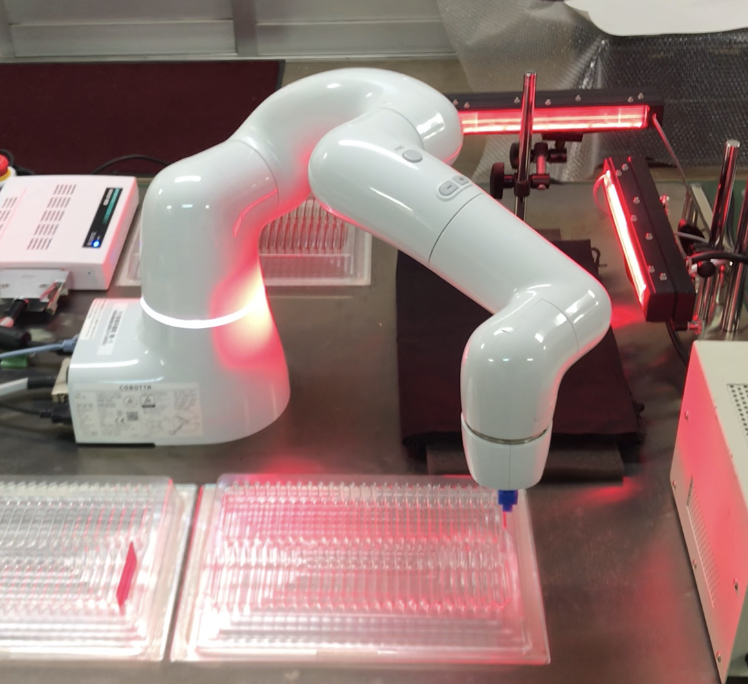
 トレーから取り出します。
トレーから取り出します。
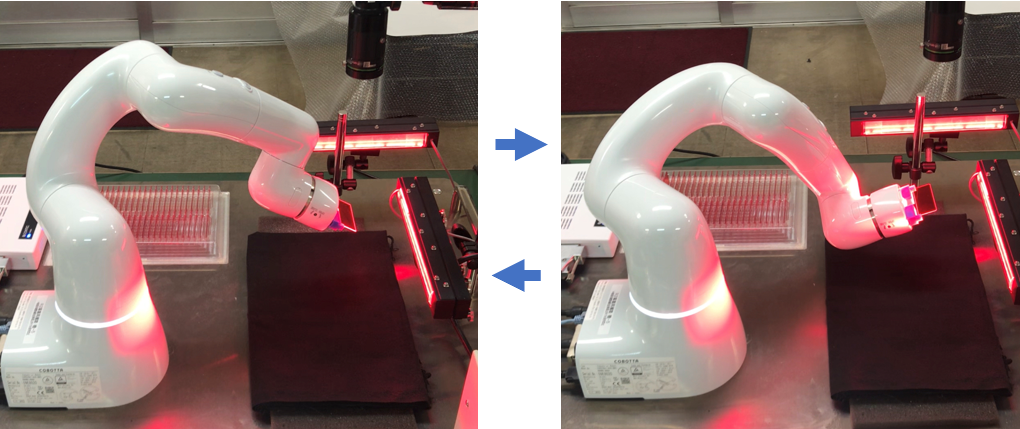 ワークの角度を変えて画像処理します。
ワークの角度を変えて画像処理します。
 OK NG トレーに振り分けます。
OK NG トレーに振り分けます。
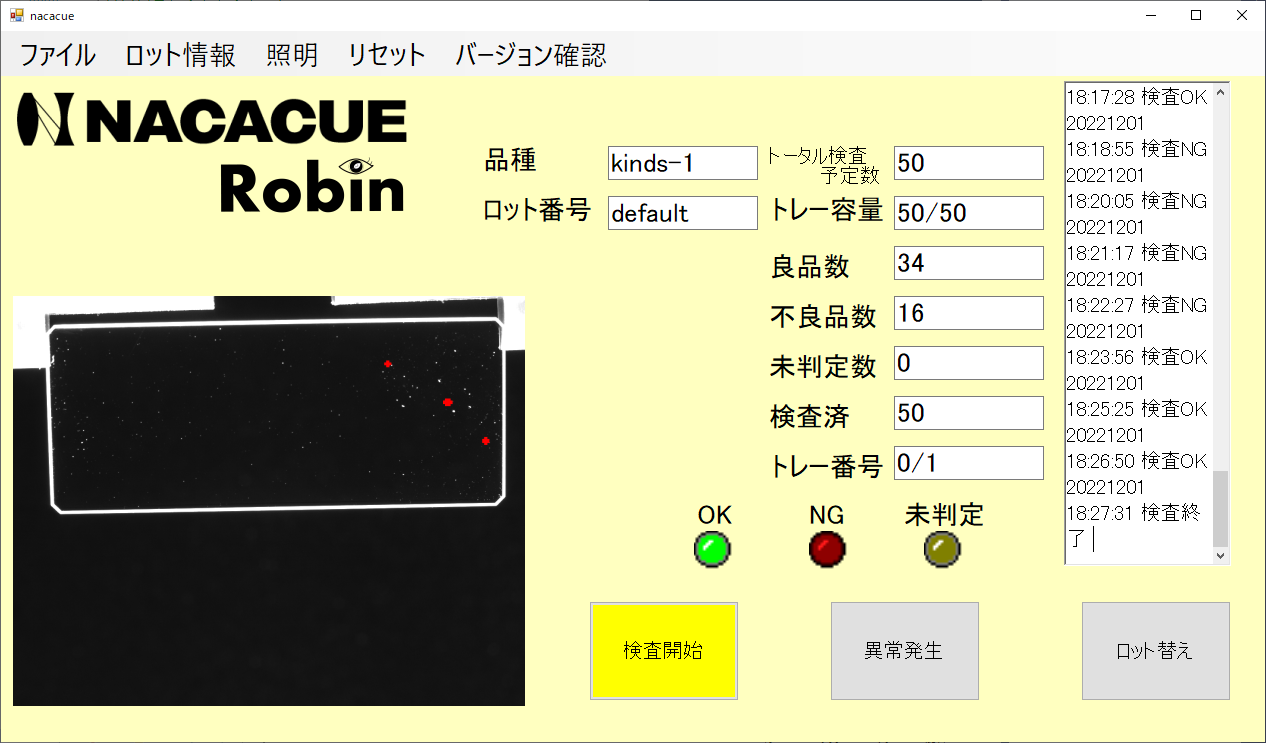 操作画面
操作画面
| システム構成 |
| ロボット:Cobotta デンソーウエーブ |
| カメラ:STC-MBE132U3V オムロンセンテック |
| レンズ:CF25ZA-1S フジノン |
| 照明:ローアングル照明 LA-0 仲久 |
| 照明電源:NPL-1 仲久 |
| I/O装置:DIO-1616BX-USB コンテック |
| 制御装置:Windows10PC with Robin FW 仲久 |
| 検出対象 |
| 光学ガラスにおける |
| 掻きキズ、突キズ、気泡、異物、コート抜け など |
製品仕様は予告なく変更する場合があります。